PCS Axis - Specified Target
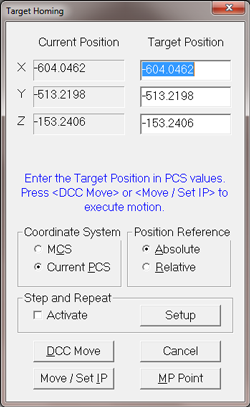
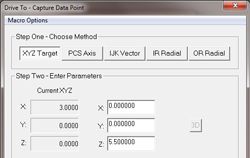
The method is similar to the described method above except a specific XYZ target position is added. This is activated by placing a check next to "Use Target Position".
Enter the XYZ target position in the provided data fields. Then press the <Measurement Point> button and the Target Homing tool will calculate a path to the target MP as two motion paths.
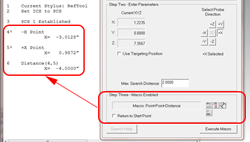
The first path traverses to a point directly over the MP target and then changes direction and executes a MP capture move.
For example, if the current position is:
X:1.000, Y:2.000, Z:2.000
The MP target using a -Z direction is:
X:5.000, Y:5.000, Z:-1.000
The traverse motion path will move parallel to the XY plane at a constant Z=2.000 until reaching X:5.000, Y:5.000 then switch to a MP capture move down to the target MP position. |